|
||||||||||||||||||||||||||
|
|
Обзор развития систем управления  В начале развития авиации системы управления летательных аппаратов (ЛA) представляли собой простые механические устройства, соединяющие рычаги управления с управляющими поверхностями. Однако вскоре возникли идеи об облегчении работы пилота, воплощением которых стал автопилот. Автопилот на самолете с помощью рулевых машин (РМ) перемещает рычаги управления «вместо» пилота (это называется параллельным включением РМ). При включенном автопилоте пилот может управлять самолетом только с помощью миниатюрных ручек-верньеров на пульте управления автопилота. Системы дистанционного управления самолетов и вертолетов  С увеличением полетного веса и скорости полета стали сильно возрастать усилия, потребные для перемещения рулен самолета. Это привело к созданию гидроусилителей – устройств, с помощью которых пилот управляет машиной, перемещая только входной элемент с очень малым усилием, а усилия на рулях воспринимаются силовой частью. Для питания силовой части применяются гидросистемы с высоким давлением рабочей жидкости. В тех случаях, когда управление самолетом невозможно без гидроусилителей, требуется резервирование (обычно дублирование) гидросистем и гидроусилителей. Аналогичный путь развития прошли и системы управления вертолетов. Усилия на рычагах управления вертолетов с полетным весом выше 3000 кг стали такими большими, что полет без гидроусилителей стал невозможен. С появлением реактивной авиации выяснилось, что некоторые самолеты имеют недостаточное демпфирование по рысканию. Так появились демпферы автоматические системы, отклоняющие путевое управление пропорционально угловой скорости рыскания, что придаст самолету увеличенное (искусственное) демпфирование. РМ демпфера рыскания встраивается в управление как «раздвижная тяга» (это называется последовательным включением РМ). При таком включении РМ должна иметь ограниченный ход (примерно 10…20% от полного хода управления) с тем, чтобы обеспечить возможность ручного управления при отказе демпфера, а также уменьшить «рывок» управления при резком уходе РМ на упор. Демпферы рыскания впервые появились на тяжелых самолетах с гидроусилителями в системе управления. Поэтому последовательные РМ выполнялись в виде маломощных электромеханических «раздвижных тяг», воздействующих не на рули непосредственно, а на входной элемент гидроусилителя. Вертолеты появились позже самолетов. и поэтому на них автоматизация управления происходила с учетом самолетного опыта. Выяснилось, что вертолет прежде всего нуждается в увеличении демпфирования но тангажу,++ по крену, а также и по рысканию. Первыми практически использовавшимися автоматическими системами для вертолетов (если не считать первых неудачных автопилотов с параллельными РМ) явились демпферы тангажа, крена и рыскания с параллельными РМ. Следующим шагом было создание вертолетных автопилотов с последовательными РМ, которые давали не только увеличение демпфирования вертолета по трем осям, но и стабилизацию заданных углов тангажа, крена и курса. В частности, таким явился первый серийный автопилот АП-34Б для вертолета Ми- 8. Такой автопилот с одними только последовательными РМ имеет недостаток: пилот должен вмешиваться в управление при уходе РМ на упор и постоянно заботиться о центрировании РМ. При дальнейшем развитии вертолетных автопилотов вместе с последовательными РМ стали применяться и параллельные в виде триммерных электромеханизмов. Они перемещают рычаги управления, освобожденные нилотом, в пределах полного хода, но через загрузочную пружину и с малой скоростью (полный ход управления за 15…20 с). Это даст возможность нилоту вмешиваться в управление без каких-либо предварительных действий при необходимости изменения траектории полета, а также для парирования отказа автопилота или параллельной РМ. Последовательные РМ стали выполняться дублированными для повышения надежности и безопасности при отказе. Параллельно развивались системы управления самолетов. На истребителях с широким диапазоном скоростей и высот полета появились демпферы не только но рысканию, но и по тангажу и крену. Возникла необходимость улучшить управляемость самолета на различных режимах полета. Поэтому демпферы стали «обрастать» дополнительными функциями: в них стали использоваться сигналы перегрузки, угла атаки и др. Эти системы стали называться «автоматами устойчивости» или «системами улучшения устойчивости» (СУУ). При применении на самолетах гидроусилителей стало необходимо создавать искусственные усилия на рычагах управления, зависящие от скорости полета, перегрузки и др. Для этого применяются специальные РМ. создающие усилия на рычагах управления. Кроме СУУ на самолетах всегда имеются автопилоты с параллельными РМ, служащие для стабилизации режима полета, наведения при стрельбе или при заходе на посадку и т.п. Таким образом, к настоящему времени системы управления самолетов и вертолетов перестали быть простыми механическими устройствами и превратились в сложные комплексы механических, гидравлических и электрических систем, обеспечивающих кроме ручного управления ЛA еще и выполнение функций улучшения устойчивости и управляемости, стабилизации режима полета и управления траекторным движением ЛА. Система управления современного вертолета кроме механической проводки включает в себя гидроусилители, гидросистемы, последовательные и параллельные РМ автопилота. Еще более сложна система управления самолета, в которой, кроме того, имеются устройства для искусственного создания усилий на рычагах управления. В ряде случаев на самолете имеются также такие специфические устройства управления как система предотвращения флаттера и т.п. Системы дистанционного управления (СДУ) для самолетов Крайняя и все возрастающая сложность систем управления самолетов уже приводила конструкторов к мысли об их замене единой системой, в которой сложные связи между рычагами управления, датчиками и между управляющими поверхностями формировались бы электрическим путем, а исполнительными устройствами были бы электрогидравлические агрегаты управления. Уже в конце 1960-х гг. в ряде стран появились экспериментальные самолеты с такой полностью электрической системой дистанционного управления (СДУ). Видимо, наиболее существенным фактором, ускорившим развитие СДУ, явились идеи о снижении статической устойчивости самолета. Реализация этой идеи давала существенные выгоды: уменьшались размеры стабилизатора, он становился несущим (т.е. создавал не отрицательную, как на устойчивых самолетах, а положительную подъемную силу); полетный вес самолета уменьшался приблизительно на 10%. Однако пилотировать статически неустойчивый самолет вручную. без СУУ в продольном направлении (с введением искусственного демпфирования и устойчивости по перегрузке) практически невозможно. Таким образом, СУУ должна была быть практически безотказной (с вероятностью отказа не выше, чем для обычных механических систем управления: 10-7 10-8 за один час полета.). Это при существующем уровне техники можно обеспечить лишь при четырехкратном резервировании каналов управления. В этой связи оказалось проще и надежнее придать СУУ и более простые функции обычного ручного управления. исключив механическую проводку управления полностью. Первыми серийными самолетами с СДУ стали истребители Су-27 в Советском Союзе и F-16 в США. На них используется 4-кратно резервированная аналоговая СДУ (на Су-27 – в канале тангажа, на F-16 в каналах тангажа, крена и рыскания). Одновременно похожее развитие имели и системы управления для пассажирских самолетов. Еще на англо-французском самолете Concorde была применена дублированная аналоговая СДУ с резервной механической проводкой управления. В дальнейшем дублированная цифровая СДУ с механическим резервом была успешно применена на аэробусах А-320/330/340. Аналогичная по концепции СДУ применена и на российских самолетах Ил-96 и Ту-204. СДУ с резервной механической проводкой управления были также применены на истребителях F-18 (США). SAAB JA37 Viggen (Швеция) и на военно-транспортных самолетах С-5А и С-17 (США). Пассажирский самолет последнего поколения Boeing 111 имеет цифровую многократно резервированную СДУ без резервной механической проводки управления. Применение техники СДУ открыло новые возможности для совершенствования самолетов. Возникла так называемая концепция CCV (Control Configured Vehicles) – J1A, конфигурация которых определяется системой управления. Помимо улучшения устойчивости и управляемости стало возможным сравнительно просто вводить в СДУ дополнительные функции управления: уменьшение перегрузок при полете в турбулентной атмосфере, уменьшение нагрузок при маневре, предотвращение флаттера, предотвращение выхода на опасные режимы полета и др. Для маневренных самолетов появилась возможность непосредственного управления подъемной силой, боковой силой, благодаря чему самолет может выполнять маневры, ранее немыслимые: прямолинейный полет с различными углами тангажа и скольжения. Применение СДУ позволило также сделать для пилота более комфортное управление: на самолетах F-16 и А-320/330/340 вместо обычных ручки управления и штурвала применена более удобная миниатюрная боковая ручка управления. 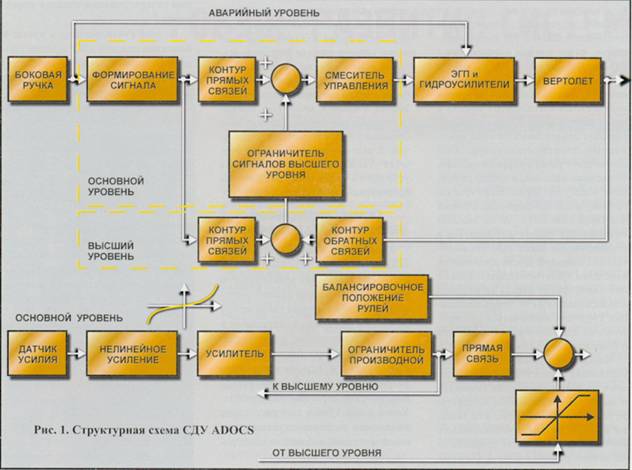 СДУ для вертолетов Сложность системы управления вертолетом, особенно двухвинтовой схемы, побудила еще в 70-х гг. применить СДУ на экспериментальном тяжелом вертолете HLN фирмы Boeing Vertol (США). Этот специализированный двухвинтовой продольной схемы вертолет-кран должен был перевозить контейнеры весом 20 т с корабля на берег и обратно, причем требовалась очень высокая точность стабилизации вертолета в точке виссния над кораблем и простота управления при маневрировании на висении (вертолет при этом пилотирует оператор, находящийся в нижней кабине лицом назад). Все эти требования могли быть выполнены только с помощью СДУ, которая и была разработана. Была применена 4-кратно резервированная аналоговая СДУ по 4 каналам управления: продольное, поперечное, путевое и общий шаг. Вертолет HLN не был запущен в серию, однако СДУ для него была полностью отлажена и прошла летные испытания на вертолете – летающей лаборатории (JU1) СН-47 Chinook.  Затем интерес к СДУ для вертолетов возник вновь в 80-х гг. в связи с повышенными требованиями к устойчивости и управляемости боевых вертолетов. Эксперименты с СДУ проводились на вертолетах-ЛЛ во Франции, в Англии и в США. Дальнейший импульс развитие СДУ получило после объявления Армией США конкурса на легкий разведывательный вертолет LHX. В него включились две группы фирм: Sikorsky/Boeing и McDonnell Douglas/Bell. Требования, выставленные военными (Документ ADS-33), были достаточно жесткими. Пример 1. Вертолет должен иметь различные типы управляемости на разных режимах полета: в поступательном полете отклонение ручки управления должно вызывать пропорциональную отклонению угловую скорость (тангажа или крена), а в сложных метеоусловиях должна обеспечиваться стабилизация места висения. Пример 2. Быстрый разворот на висении: при включенной стабилизации места и высоты висения выполнить разворот на 180° за время не более 5 с при ветре не менее 10 м/с с освобожденным управлением циклическим и общим шагом. При этом должны выдерживаться точности: конечный курс ±2°, высота ±1 м, место висения – внутри круга диаметром 3 м. Очевидно, что выполнение таких требований немыслимо без применения СДУ. Обе группы фирм предусмотрели установку СДУ на своих конкурсных вертолетах. СДУ были уже не аналоговыми, а цифровыми. Фирмы Sikorsky/Boeing разработали СДУ под названием ADOCS, в которой передача сигналов от рычагов управления на вычислители и на рулевые приводы осуществлялась по оптоволоконным линиям для большей помехозащищенности. Была применена боковая ручка управления. Система ADOCS была отработана и испытана на вертолете-ЛЛ Sikorsky UH-60. Фирмы McDonnell Douglas/Bell также разработали СДУ и испытали ее на вертолете-ЛЛ АН-64. Другое направление развития СДУ для вертолетов открылось в связи с разработкой фирмами Bell Boeing вертолета-самолета с поворотными винтами V-22 Osprey. При испытаниях предшествовавшего ему экспериментального ЛА XV-15 выяснилось, что механическая система управления на такого рода ЛА вообще неприменима ввиду ее крайней сложности, связанной с изменением принципов управления при повороте винтов. Для V-22 была разработана цифровая СДУ. Конкурс на вертолет LHX выиграли фирмы Sikorsky/Boeing, результатом явился разведывательно-боевой вертолет RAH-66A Comanche, запуск которого в серию отложен на начало 2000-х гг. в связи с изменением финансирования конгрессом. Опытный вертолет на настоящее время все же прошел некоторый цикл испытаний. СДУ позволяет упростить конструкцию системы управления и связи ее с системами автоматического управления (пилотирования). Но главное – она дает возможность применения более гибких законов управления, обеспечивающих оптимальные устойчивость, управляемость и маневренность вертолета на всех режимах полета. Все это и определило ее выбор при разработке нового транспортного вертолета NH-90, совместного производства фирм Eurocoptcr (Франция и Германия), Agusta (Италия) и Fokker (Нидерланды). В частности, на NH-90 предусмотрена система подавления вибраций с помощью управления несущим винтом по высшим гармоникам через СДУ.
Основы построения СДУ для современных самолетов и вертолетов Дадим неполный перечень современных ЛА. имеющих СДУ: Серийные истребители: Су-27, F-16, F-18, JA37 и их модификации. Серийные транспортные самолеты: С-5 А. С-17. Серийные магистральные пассажирские самолеты: А-320 330/340, Boeing 777. Опытные истребители: F-22, Rafalle, Eurofighter, некоторые опытные Миг и Су. Опытные вертолеты: RAH-66, NH-90, V-22, Ансат(Казанский вертолетный завод). Опытные магистральные пассажирские самолеты: Ил-96, Ту-204. СДУ всех упомянутых ЛА можно разделить на две группы: СДУ с резервной механической проводкой и «чистые» СДУ, без механического резерва (отметим, что СДУ с механическим резервом для вертолетов практически неприменимы). Механический резерв имеют самолеты: F-18, JA37, С-5А, С-17. А-320/330/340.Ил-96Б. Ту-204. СДУ с механическим резервом обычно имеют небольшую кратность резервирования электрической части, например, дублирование для самолетов А-320/330/340. Иногда и в этом случае применяют 4-кратное резервирование (Ил-96). Первоначально все СДУ были аналоговыми. в настоящее время происходит переход к цифровым системам. СДУ без механического резерва всегда имеют высокую кратность резервирования. Истребители Су-27 и F-16 имеют 4-кратно резервированные аналоговые СДУ. На NH-90 применена 4-кратно резервированная цифровая СДУ. Система дистанционного управления последней разработки для вертолетов RAH-66, V-22 и для самолета F-22 имеют во всех каналах по 3 цифровых вычислителя, каждый из которых дублирован. Для повышения надежности системы каждая половина цифрового вычислителя программируется различными группами программистов. В качестве примера принципа реализации современной СДУ рассмотрим (рис. 1) структурную схему СДУ ADOCS (но материалам доклада на 39-м Форуме Американского вертолетного общества в 1983 г.). Система имеет 3 уровня: – аварийный, обеспечивающий непосредственную связь ручки управления с электрогидравлическими приводами (ЭГП); – основной: управление от ручки с формированием сигналов, обеспечивающих приемлемое управление с разложением сигналов по ЭГП («развязанное» управление) и со вводом сигналов балансировочных положений рулей; – высший: прямые и обратные связи, обеспечивающие оптимальные законы управления. Сигналы высшего уровня подаются на основной уровень через ограничители для обеспечения безопасности полета при отказе датчиков высшего уровня. Ведущий специалист МВЗ д.т.н. С.Ю. Есаулов |
|
||||||||||||||||||||||||
|
Главная | В избранное | Наш E-MAIL | Прислать материал | Нашёл ошибку | Верх |
||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||