|
||||
|
|
Неудачный дебют Вертолетная гидроакустическая станция АГ-19 «Клязьма» Анатолий АРТЕМЬЕВ В истории создания различных средств военного назначения нередки случаи, когда они несмотря на удовлетворительные результаты государственных испытаний на деле оказываются неработоспособны или не в полной мере отвечают своему назначению. В оправдание подобных явлений обычно ссылаются на недостаточное финансирование, малый объём полученной информации, несовершенство методики оценки и другие причины, которые в общем случае можно посчитать с некоторым допущением объективными. Но иногда поступление недоработанной или просто неработоспособной техники являлось результатом недобросовестности и некомпетентности лиц, проводивших испытания. К подобным неудачам в полной мере можно отнести первую попытку создания отечественной опускаемой гидроакустической станции. С самого начала своего возникновения вертолёты рассматривались как перспективное средство борьбы с подводными лодками (ПЛ), но чтобы превратить желаемое в действительное следовало оснастить их соответствующим оборудованием поиска и поражения, а не полагаться на эфемерную возможность случайного обнаружения объекта поиска визуально и с помощью радиолокации. Не без оснований пришли к выводу, что следует в наибольшей степени использовать способность вертолёта осуществлять висение, что создавало возможность применить в качестве основного средства поиска опускаемую гидроакустической станцией, а не средства одноразового использования к которым относились радиогидроакустические буи. Полагали, что в этом случае представляется возможность не только снизить стоимость поиска, но и придать вертолёту новые качества: повысить точность классификации контакта, обследовать водную среду в непосредственной близости от кораблей, получать более точные данные о месте и элементах движения цели, повышающие эффективность использования средств поражения, обеспечивается лучшее соотношение по критерию стоимость-эффективность. Доводы в пользу опускаемых гидроакустических станций подкреплялись поступлением на вооружение конкретных образцов. Основное внимание уделили гидролокаторам, работающим как в режиме шумопеленгования, так и эхопеленгования. Второй род работы позволял определить не только пеленг, но и расстояние до ПЛ. Полагали, что это повысит эффективность поиска малошумных лодок. В нашей стране разработка авиационных противолодочных сил и средств шла со значительным отставанием от США и Великобритании и некоторые считали подобное положение не лишённым преимущества, так как имелась возможность учиться на чужих ошибках. Но это относилось категории чёрного юмора. Первые вертолёты Ми-4 в поисково-спасательном и транспортно-десантном вариантах поступили в авиацию СФ и ЧФ в 1954 г. Через два-три года появился противолодочный вариант – Ми-4М, вооруженный радиогидроакустической системой поиска и обнаружения ПЛ «Баку». Сбрасываемые средства поиска ПЛ на вертолёте, отличавшиеся внушительными габаритами и весом – пассивные ненаправленные буи РГБ-Н, обеспечивающие получение минимальной информации о подводной обстановке. Малосильный Ми-4 в лучшем случае мог поднять восемь буёв, что не позволяло говорить о его высоких возможностях. В обстановке, когда даже такие буи поставлялись в ограниченном количестве, перспектива установить на вертолёты гидроакустическую станцию казалась заслуживающей внимания. В соответствии с заданием разработали опускаемую гидроакустическая станцию АГ-19 «Клязьма». Удалось создать устройство, имеющее только один вид работы – шумопеленгования, поэтому оно никак не подходило под определение гидролокатора. В основу принципа работы станции положено явление передачи в воде через колебания среды шумов (звука), создаваемых ПЛ при движении. Поскольку вода плотнее воздуха в 800 раз, то и звук в ней распространяется со скоростью 1420-1520 м/с. Принятые шумы воздействуют на гидроакустическую приёмную систему станции – электроакустический преобразователь пьезокерамического типа. Под воздействием звукового давления происходит деформация материала керамики и на её поверхности возникает электрический заряд. Электрические колебания звуковых частот, поступающие с приёмной системы, усиливаются и прослушиваются экипажем через самолётное переговорное устройство с помощью телефонов, а также поступают на стрелочный индикатор для визуальной оценки величины сигнала. С тем, чтобы экипаж мог выбрать частоты, обеспечивающие оптимальные условия для обследования водной среды, в станции АГ-19 применили три рабочих диапазона: 6-8; 8-11 и 11-14 кГц. С точки зрения получения наибольших дальностей обнаружения ПЛ целесообразно использовать первый диапазон, так как в этом случае звуки вследствие меньшего коэффициента пространственного затухания распространяются на большие расстояния. Однако выяснилось, что в диапазоне низких частот наиболее интенсивны помехи от винтов вертолёта и собственные шумы усилителя. 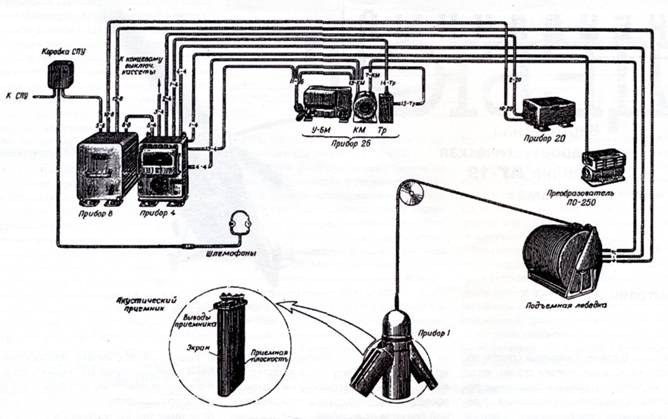 Принципиальная схема вертолетной гидроакустической станции АГ-19 и её основные элементы Акустическая приёмная система имела направленность в вертикальной и горизонтальной плоскостях порядка 30 град. Для пеленгования источника шумов в станции был использован максимальный метод пеленгования. Отсчёт пеленга производился в момент максимального отклонения индикатора, показывающего уровень принимаемого сигнала (или по величине отметки на экране электронно-лучевой трубки), что соответствовало прохождению оси диаграммы направленности акустической антенны через источник шума. Акустическая приёмная система вращалась в азимутальной плоскости со скоростью 4 об/мин. Гидроакустическая станция АГ-19 прошла Государственные испытания и в 1958 г. была принята на вооружение. Согласно Акту государственных испытаний, проведенных в глубоководных районах Чёрного моря, дальность обнаружения дизельной ПЛ проекта 613 с обесшумленными винтами, следовавшей под электродвигателями на перископной глубине и на глубине 40-50 м при волнении моря до 5 баллов (что весьма сомнительно!) составляла: при скорости 6 узлов (11,2 км/ч) – 30 каб (5,6 км); при увеличении скорости до 10 узлов (18,5 км/ч) до 60 каб (11,2 км). Остальные характеристики также выглядели вполне пристойно: срединная точность пеленгования – 4 град.; время обзора акватории за одно висение вертолёта, включая время подъёма и опускания акустического приемника – 5-6 мин Малосведущие люди данные, полученные на испытаниях принимают как нечто незыблемое, не учитывая целый комплекс факторов, определяющих дальность обнаружения ПЛ. В реальных условиях дальность обнаружения лодки гидроакустическими средствами зависит от её скорости, глубины погружения, гидрологических условий, шумов вертолёта, создающих дополнительные помехи, уровня подготовки оператора. Особый интерес представляют гидрологические условия, которые могут свести на «нет» все усилия экипажа. Траектория звукового луча в водной среде не прямолинейна и зависит от скорости распространения звука в слоях воды, имеющих различную температуру и (в меньшей степени) солёность. Изменении температуры на 1 град, приводит к изменению скорости звука на 3,3 м/с и на 1, 2 м/с при из- менении солёности на одну промилле т. е. на 1 г. соли в литре воды. Особенно резко изменения температуры происходят в вертикальной плоскости. В этом случае звуковой луч, проходя через слои воды с различной температурой искривляется всегда в сторону слоёв воды более холодных и более плотных, в которых потери энергии меньше. Подобное явление именуется рефракцией звукового луча и в зависимости от знака температурного градиента (величина изменения температуры в градусах) может быть или положительной или отрицательной. При положительной рефракции температура воды с глубиной повышается, скорость распространения звука увеличивается, а звуковые лучи отклоняются к поверхности моря. Величина заглубления акустического приёмника на дальность обнаружения ПЛ при таком виде рефракции существенно не влияет и она определяется в зависимости от других факторов. При отрицательной рефракции температура воды с глубиной понижается, скорость распространения звука уменьшается, и звуковые лучи отклоняются ко дну. Отрицательная рефракция наблюдается при весенне-летнем прогреве поверхности слоя, ниже которого сохраняются более низкие температуры. Это приводит к образованию сезонного слоя температурного скачка, достигающего своего максимума летом и разрушающегося в конце осени. При прохождении акустических волн через слой скачка происходит ослабление их интенсивности из-за расширения фронта акустической волны и рассеяние вследствие влияния пузырьков газа, планктона и прочих неоднородностей. Когда акустический приемник находится выше слоя температурного скачка, а ПЛ под ним, то дальность обнаружения её может уменьшаться в несколько раз в сравнении с обнаружением в случае изотермии. В подобных условиях представляется целесообразным опускать акустический приемник под слой скачка. 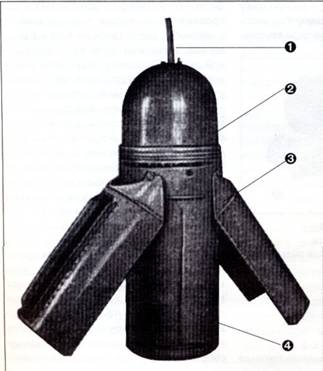 Прибор 1 1 – кабель-трос; 2 – колпак; 3 – защитный кожух; 4 – стабилизирующие крылья  Приемник в сборе 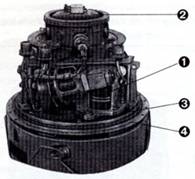 Поворотное устройство (вверху): 1 – электродвигатель АДП-1; 2 – индукционный датчик ИД; 3 – плата; 4 – крышка Из приведенного следует, что для получения оптимальных дальностей обнаружения подводной лодки экипаж, имея данные о гидрологических условиях, должен выбирать величину заглубления приёмного устройства гидроакустической станции. Конструктивно станция состояла из нескольких блоков: опускного устройства (Прибор 1), пульта управления станцией (Прибор 4), компасного устройства (Прибор 26), усилителя (Прибор 8) и выпрямителя (Прибор 20). Опускное устройство включало акустическую систему, механизм поворота, индукционный датчик (ИД) компасного устройства и кожух со стабилизирующими крыльями. Акустический приемник был собран из керамических трубок, заключенных в герметичный корпус прямоугольной формы из листового титана толщиной 1 мм. Трубки состояли из набора колец, изготовленных из титаната бария с посеребрением внутренней и верхней поверхности, разделенных уплотняющими резиновыми прокладками и с помощью внутренней тонкостенной трубки, имеющей резьбу, стягивались гайкой. Кольца в каждой трубке соединялись параллельно, а трубки – последовательно. Внутренняя полость корпуса приёмника через штуцер в крышке заливалась кремнеорганической жидкостью «Калорий-2» (силиконовое масло), с температурой замерзания порядка 60 град. Одна из плоских сторон приёмника внутри была оклеена звукопоглощающими резиновыми экранами. Через резиновые амортизаторы акустический приёмник крепился к валу поворотного устройства, которое обеспечивало его вращение и выдачу в указатель пеленга углов поворота приёмника и корпуса Прибора 1. Вращение акустического приёмника осуществлялось с помощью асинхронного двухфазного электродвигателя АДП-1, имеющего немагнитный ротор, через редуктор. Пульт управления предназначался для включения и выключения питания станции, управления вращением акустического приёмника, контроля наличия шумов по стрелочному индикатору (миллиамперметру) и отсчёта пеленга по показаниям указателя типа УГР-1 (из комплекта компаса ГИК-1). Компасное устройство являлось упрощенным вариантом авиационного гироиндукционного компаса ГИК-1 и состоит из индукционного датчика, расположенного в Приборе 1, указателя УГР-1 и обеспечивает выработку и отсчёт данных пеленга цели. Для усиления сигнала, поступающего с акустического приёмника применялся трехкаскадный ламповый усилитель супергетеродинного типа. На его лицевой панели располагался переключатель рабочих диапазонов частот и регулятор усиления. В комплект станции входил также выпрямитель, обеспечивающий выпрямление переменного тока сети вертолёта в постоянные напряжения для питания цепей анода и накала ламп усилителя, а также преобразователь переменного тока ПО-2БО (напряжением 115 в, частотой 400 гц). Для обеспечения использования станции в соответствии с предназначением на вертолёте Ми-4 устанавливалось дополнительное оборудование: кабель-трос КТВ-12 длиной 48 м; электролебедка ЛПГ-1 с барабаном и тросоукладчиком; пульт управления лебедкой ЛПГ-1 со счётчиком длины выпущенного кабель-троса; специальная приемная кассета для размещения и фиксации Прибора 1 в походном положении; направляющий блок с тросорубом для направления кабель-троса при переходе его от барабана лебедки к Прибору 1 и отделения последнего от вертолёта в аварийных ситуациях. Лебедка и кассеты снабжались концевыми выключателями, обеспечивающими автоматическое выключение электродвигателя лебедки при поднятом и полностью опущенном на кабель-тросе Приборе 1. Несмотря на то, что станция была принята на вооружение, появление её в авиации флотов бурного энтузиазма не вызвало, что объяснялось весьма простыми соображениями. И в первую очередь – соображениями безопасности. С безопасностью, как и на большинстве отечественных летательных аппаратов, на вертолётах Ми-4 дела обстояли не совсем благополучно. Особенно когда это было связано с необходимостью выживания экипажа в аварийных ситуациях над морем. Некоторые исследования в 'том направлении проводились. Они показывали, что даже в случае управляемой вынужденной посадки на воду вертолёт с остановившимся двигателем и расположенным выше центра тяжести редуктором несущего винта переворачивался и через 1-1,5 мин полностью погружается. При этом в процессе приводнения и переворачивания безопасный выход экипажа не обеспечивался из любой двери и оставалась весьма призрачная возможность покидания вертолета после полного затопления кабин. Однако для покидания кабин следовало иметь миниатюрные акваланги или кислородные приборы, обеспечивающие автономное дыхание в течение нескольких минут; спасательные жилеты создавали помехи вынужденному покиданию вертолёта; выходные люки и двери должны были освещаться. От экипажа требовалась железная выдержка, самообладание, специальные интенсивные тренировки на пределе физических и моральных возможностей. В случае отказа двигателя на висении никаких шансов на спасение у экипажа не оставалось. Это в полной мере оправдывало нежелание подвергать жизнь людей повышенной опасности, поэтому освоением станции АГ-19 в авиации флотов не занимались. 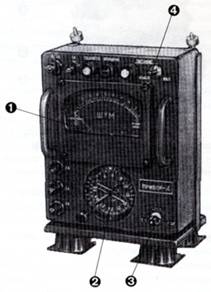 Приемник в сборе 1 – стрелочный индикатор; 2 – указатель пеленга УГР-1; 3 – переключатель; 4 – выключатель питания 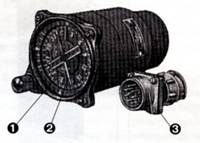 Указатель пеленга УГР-1 1 – шкала магнитного курса; 2 – стрелка; 3 – штепсельный разьем Однако штаб авиации ВМФ, по инициативе которого разрабатывалась станция, оказался в числе заинтересованных в её освоении. Жизни его представителей ничто не угрожало. Требовалось подтвердить данные, полученные на испытаниях, показать целесообразность установки станции на вертолёты и подготовить рекомендации экипажам по её тактическому использованию. Такую задачу поставили научно-исследовательскому отделу применения противолодочной авиации 33 учебного центра авиации ВМФ в Николаеве. Ответственным исполнителем назначили старшего ведущего летчика отдела майора А. М. Артемьева. Основные полёты выполнены со штурманом майором А П. Походзило. Для приобретения опыта некоторые полёты выполнял командир 555 ап полковник А П. Писаренко со штурманом полка подполковником Бедюх. В общих чертах идеология использования опускаемой гидроакустической станции при поиске ПЛ не претендовала на оригинальность, основные её теоретические положения рассматривались в периодической печати и наиболее обстоятельно излагались в работах капитана 2 ранга Сиротина, который в это время проходил службу в 5-м учебном центре ВМФ. Практически процесс поиска ПЛ вертолётами с помощью станции АГ-19 сводился к последовательному прослушиванию водной среды в заданном районе моря, из точек расположенных одна относительно другой на расчётных интервалах. В качестве основных критериев оценки тактических возможностей предлагались поисковая скорость и количество циклов висения за полёт на данном удалении. Зная эти две характеристики и некоторые другие данные нетрудно было рассчитать площадь, обследуемую за вылет. Поисковая скорость вертолёта зависела от расстояния между очередными точками обследования, времени висения в каждой из них и средней скорости полёта. При расчёте средней скорости учитывалось время торможения вертолёта перед зависанием, время разгона для перелёта в очередную точку обследования. В дальнейшем, пришлось учитывать, также, и время маневра вертолёта в случае, если, например, поисковый курс совпадал с направлением ветра. Расстояние между очередными точками обследования в свою очередь определялось несколькими факторами и в первую очередь – ожидаемой дальностью обнаружения ПЛ в конкретных условиях и заданным перекрытием между очередными зонами прослушивания с тем, чтобы исключить незамеченный проход ПЛ из необследованного района в обследованный. В тактических расчётах принимался коэффициент перекрытия равный 0,7. Это означает, что расстояние между очередными точками должно было составлять 1,4 дальности обнаружения ПЛ при определенной дальности станции и скорости ПЛ. Время висения включало опускание Прибора 1 и прослушивание водной среды. В расчётах его принимали равны 5 мин. Сумма этих времен определяла время цикла. Ожидалось, что при дальности обнаружения ПЛ порядка 30 каб. (5,6 км) поисковая скорость вертолёта составит 41-48 км/ч, с увеличением дальности в два раза она возрастет в среднем на 31-33% и достигнет величины 54-65 км/ч. Если же дальность обнаружения будет равна 2 км, то поисковая скорость снизится до 20-25 км/ч. Предполагалось, что в идеальных условиях, что вертолёт, оборудованный станцией АГ-19 за один полёт продолжительностью 3 ч при дальности обнаружения ПЛ, равной 5,6 км (скорость ПЛ – 11,2 км/ч) на удалении 100 км сможет выполнить 9 зависаний на высоте 10-12 м (полётная масса вертолёта перед первым зависанием – 6300 кг, запас топлива – 550 кг). Вертолёт Ми-4СП с уже смонтированной гидроакустической станцией поступил из Феодосии. До этого он использовался для проведения некоторых исследований и, в частности, для посадок на воду с баллонетами, изготовленными из прорезиненной ткани. Поскольку баллонеты имели значительные размеры, вертолёт снабдили удлиненными стойками шасси и он стал еще более неуклюжим. Выбор поисковоспасательного вертолёта для установки станции обьяснялся его меньшей на 1200 кг массой в сравнении с вертолётом Ми-4М противолодочного варианта и небольшим потребным объёмом доработок. Всё оборудование гидроакустической станции размещалось в грузовом отсеке. Несмотря на полную исправность полученного комплекта станции, с ней немало повозились прежде чем она стала проявлять «признаки жизни». Вблизи стоянки вертолётов в Очакове имелся небольшой пожарный бассейн, который для снижения помех покрыли изнутри пористой резиной и производили различного рода доработки и доводки, направленные на уменьшение собственных шумов станции, выполняли различные регулировки, калибровки и т. п. Следует отдать должное, кое-что инженерам и техникам удалось сделать. Станция довольно отчётливо «слышала» тиканье наручных часов на расстоянии 10-20 см от Прибора 1.  Майор Анатолий Артемьев – старший ведущий летчик НИО 33-го учебного центра авиации ВМФ, участник испытаний станции АГ-19 (1963 год) В соответствии с принятой методикой исполнители темы готовились к выполнению поставленной им задачи как теоретически, так и практически. Были изучены все материалы, связанные с испытаниями станции АГ-19, её конструктивные особенности. Для подготовки штурманов использовались граммофонные пластинки и магнитофонные записи шумов ПЛ, произведенные с помощью корабельных гидроакустических станций. Но, как показало дальнейшее, они оказались далеки от реальных, поскольку на шумы не накладывались помехи вертолётного происхождения. Одновременно с этим лётный экипаж готовился к полётам, в которых наиболее сложным элементом являлось стабильное висение вертолёта относительно выбранной точки. Из материалов государственных испытаний следовало, что висение вертолёта с выпущенной гидроакустической станцией выполнялось на высоте 10-12 м. Однако это оказалось не более чем благим пожеланием и мало соответствовало действительности. Висение на этих высотах не исключало образование брызг, а позднее, когда стали выполняться полёты с гидроакустической станцией, оказалось, что уровень шумов от несущего винта и двигателя, проникающих в воду, вызывал необходимость загрубления чувствительности усилителя, а следовательно и снижению дальности обнаружения ПЛ. Пилотирование вертолёта на висении оказалось занятием достаточно скучным и утомительным. Экипаж находился в постоянном напряжении. Предварительно, точка в которой предстояло выполнять висение, обозначалась с помощью ориентирной морской бомбы ОМАБ-25-12Д, создававшей на водной поверхности хорошо видимое ярко-зелёное пятно. После этого следовало выполнить маневр на зависание в направлении против ветра, удерживая пятно спереди слева на расстоянии 20-15 м. Высота висения выдерживалась визуально из-за отсутствия на вертолёте радиовысотомера малых высот. Основные полёты выполнялись с аэродрома Кача в период июнь-июль 1962 г. Первые полёты производились с целью тренировки штурмана в работе с включением аппаратуры станции по шумящим объектам в виде различных судов и катеров. Не представляло особого труда выяснить, что в погоне за снижением веса станции Прибор 1 оказался легким, имел излишний запас плавучести и погружался крайне неохотно. Пришлось к его нижней части прикрепить дополнительный груз в виде бронзовой шайбы весом 8 кг. При слабом ветре и в штиль высоту висения приходилось увеличивать до 18-20 м, что вызывало необходимость увеличения мощности двигателя выше номинальной. В этом случае заглубление акустического приемника, учитывая ограниченную длину кабель-троса, уменьшалось до 25-20 м. В целях безопасности висение вертолёта производилось с открытыми дверями кабины лётчиков и грузовой кабины. Это создавало иллюзию возможности покидания вертолёта в случае аварийной ситуации, однако шум в кабинах существенно возрос. Для его снижения принимались некоторые меры. Если первые полёты производились в штатных шлемофонах, то впоследствии стали пользоваться шлёмофонами гидроакустиков. Они были изготовлены из плотной ткани, а амбушюры телефонов имели подушки из мягкого полиэтилена с глицериновым наполнителем. Нужно отдать должное разработчикам подобных шлемофонов – они хорошо обтягивали голову и не утомляли. После стабилизации режима висения штурману давалась команда выпустить прибор 1. Для этого отдавался упор в кассете, включалось питание станции, переключатель на пульте управления электролебедкой переводился в положение «Выпуск», после чего Прибор 1 заглублялся в воду. До касания воды использовалась вторая скорость вращения лебедки, а с момента касания, во избежание захлёстывания кабель-троса за стабилизатор, первая. Для разматывания кабель-троса на 45 м (три метра согласно инструкции оставалось на барабане лебедки) требовалось 45-50 с и за это время схема станции приходила в рабочее состояние. После погружения Прибора 1 на установленную глубину переключателем включалось правое или левое вращение акустического приёмника. Считалось, что 2-3 мин вполне достаточно для первичного обнаружения цели. Однако это оказалось не совсем так, поскольку следовало отрегулировать чувствительность усилителя и выбрать диапазон частот. Чувствительность (уровень шумов) устанавливалась 12-позиционным переключателем на Приборе 8. Переключение на одно положение увеличивало или уменьшало уровень принимаемого сигнала в два раза. При наличии источника шума в пределах дальности действия станции и прохождении через него характеристики направленности антенны стрелка указателя на индикаторе «Шум» отклонялась вправо, в телефонах на короткое время (1-2 с) усиливался сигнал. Отсчёт пеленга цели производился по шкале указателя компасного устройства УГР-1 в момент максимального отклонения стрелки индикатора и наибольшей величины сигнала в телефонах. Однако при непрерывном вращении акустической системы произвести отсчёт пеленга не представлялось возможным из-за значительной инерционности акустической антенны, дополнительно отрабатывающей по ходу 6-8 град и более, что никак не обеспечивало среднюю точность пеленгования 4- 5 град, как было записано в акте государственных испытаний. Штурман капитан A. Походзило и инженер-подполковник B. Ачкасов предложили достаточно простой выход из положения: в момент максимального отклонения сигнала стрелка указателя УГР-1 специальной кнопкой отключалась. Это позволяло повысить точность отсчёта. После отпускания кнопки сельсинная связь вновь восстанавливалась. Задача классификации контакта формально возлагается на командира экипажа, но фактически эту операцию выполнял штурман. Однако сделать это в режиме непрерывного вращения, учитывая, что ширина диаграммы направленности антенны в горизонтальной плоскости составляла 30 град, оказалось невозможным и приходилось прекращать вращение антенны, установив переключатель управления двигателем на пульте управления в положение «Стоп». На классификацию контакта, которая производилась по характерным шумам, создаваемым винтами ПЛ, уходило не менее 30-40 с и существенно зависело от опытности штурмана. Задача лётчиков состояла в том, чтобы предельно точно выдержать параметры висения, не допуская отклонения кабель- троса от вертикального положения более чем на 5-10 град и изменения высоты. За вертикальностью кабель-тр^са следил штурман и давал команду лётчику о направлении смещения. При нарушении вертикальности кабель-троса изменялось положение Прибора 1, затруднялся обзор водной среды, возникали ошибки в определении пеленга. Были случаи, когда Прибор 1 вообще всплывал на поверхность. Выдержать вертикальность было сложным из-за того, что пятно ОМАБ довольно быстро размывалось, рябь от закрученной струи несущего винта создавала на водной поверхности иллюзию смещения. Причём вертикальность кабель-троса могла нарушаться не только из-за не выдерживания параметров висения. Это могло происходить и при наличии поверхностных течений в районе поиска. Как это часто бывает, не обходилось без курьёзов. В одном из полётов вертолёт, пилотируемый полковником А. П. Писаренко со штурманом подполковником Бедюх, во время висения сместился и кабель-трос зацепился за стабилизирующее крыло Прибора 1. И гидроакустическая станция до этого времени игнорировавшая шумы ПЛ, следовавшей под выдвижными устройствами, вдруг стала выдавать информацию. Причина совершенно очевидна – изменилось положение диаграммы направленности и шумы ПЛ стали прослушиваться. Однако посадку пришлось производить с выпущенным Прибором 1, принимать его на руки и отводить в сторону, чтобы вертолёт мог приземлиться. Но это частный случай. К захлестыванию кабель-троса за стабилизирующее крыло приводило и резкое уменьшение высоты висения. Для подъема Прибора 1 из воды переключатель на пульте управления лебедкой устанавливался в положение «Уборка», а переключатель управления вращением акустической системы в нейтральное положение – «Стоп». При подъёме использовались первая и вторая скорости двигателя лебедки. После доклада штурмана о входе Прибора 1 в кассету производится разгон вертолёта для перелёта в следующую точку висения. Разгон до скорости 100 км/ч занимал 30-40 с. С приходом в очередную точку все операции повторялись: сбрасывался ОМАБ, производился маневр для захода на висение в направлении против ветра, снижение, торможение, зависание и другие операции. Всего с аэродрома Кача выполнено 40 полётов, в каждом из которых было по 3-4 висения. В процессе подготовки к полётам приходилось постоянно производить различные усовершенствования гидроакустической станции, в основном силами инженерно-авиационной службы 555 полка 33 центра. Не оставалась безучастными и специалисты – инженеры авиации ВМФ, в частности инженер-полковник Чёрный. Основные отказы приходились на усилитель станции и кабель-трос, который не выдерживал погружений и затекал в месте соединения с Прибором 1. Приходилось часто заменять кабель-трос, попытки уплотнить место соединения с Прибором 1 положительного результата не давали. Наблюдался и такой дефект, как скручивание кабель- троса с повреждением его оболочки. Полёты позволили установить потрясающе низкую надёжность всех без исключения элементов гидроакустической станции. Чувствительность акустической системы оказалась ниже всякого предела. Она упорно не обнаруживала ПЛ, имевших различные скорости и удаления, несмотря на то, что для повышения шумносги в соответствии с заданием лодка буксировала выпущенный аварийный буй. Гидрологические условия в период проведения исследований не были столь благоприятны, как при проведении Государственных испытаний. Они характеризовались наличием слоя температурного скачка на глубине 20-30 м. Однако даже и в этом случае старались обеспечить лучшие условия для обнаружения, а не создавали дополнительные трудности. Высокий уровень шумов вертолёта, проникающих в водную среду из-за режима работы двигателя, близкого к взлётному, требовал «загрубления» чувствительности усилителя. Всё это привело к тому, что в тех редких случаях, когда удавалось обнаружить ПЛ, дальности не превышали 1- 1,5 км, что существенно отличалось от данных испытаний. Достичь высокой точности измерения пеленга также не представилось возможным и полученные данные свидетельствовали, о том, что ошибка достигает 8-10 град. Поскольку режим работы двигателя на висении существенно отличался от номинального, соответственно возрос расход топлива. Это непосредственно влияло на возможности комплекса, а-принимая во внимание увеличение времени цикла почти в два раза за один вылет, вертолет имел возможность произвести лишь 4-5 висений в лучшем случае на удалении от аэродрома базирования до 50 км. Несколько позже во время командировки в Феодосию мне довелось поговорить с лётным составом, проводившим испытания вертолёта с гидроакустической станцией. Именно их подписи стояли на Акте испытаний. Когда я спросил, как они могли дать положительное заключение явно неработоспособной станции, штурман, несколько смутившись, честно ответил, что разработчик «организовал хороший стол!». Это обстоятельство, по-видимому, и оказалось решающим в оценке станции. Приём конечно далеко не новый, использовался не так уж редко. На основании проведенных в 33 центре исследований был составлен отчёт, который свидетельствовал о существенном расхождении данных Государственных испытаний и с фактическими. Поисковая скорость вертолёта со станцией АГ-19 не превышала 14 км/ч, расход топлива на висении оказывался значительным и радиус действия вертолёта с выполнением пяти висений не превышал 50 км. Всё это свидетельствовало о тактической нецелесообразности применения на вертолётах Ми-4 гидроакустической станции АГ-19, которая была явно не доведена до работоспособного состояния. Кроме того, обращало внимание и другое немаловажное обстоятельство. Как уже отмечалось поисково-спасательный вертолёт Ми-4СП имел меньший в сравнении с Ми-4М полётный вес и представлял наименьшую сложность в переоборудовании. Но в этом случае пришлось бы вывести их из состава аварийно-спасательной службы, что также не нашло бы поддержки у руководства флотов, которые командовали морской авиацией. И штаб авиации ВМФ, как всегда, поступил очень мудро. Отчёт по НИР, по-видимому, никто не удосужился прочитать и в авиацию флотов направили указание о необходимости освоения станции АГ-19. Указание, как и следовало ожидать, дружно проигнорировали, а станции, которые имелись в авиации флотов (десять экземпляров), постепенно сдали на склады и эпопея с новацией пришла к своему логическому завершению. Постепенно о неудачной станции забыли и лишь с поступлением на вооружение морской авиации корабельных вертолётов Ка-25ПЛ пришлось снова встретиться со сложностями использования опускаемых гидроакустических станций более высокого уровня. Прим. редакции: В последующих номерах нашего журнала будет опубликован цикл статей А М. Артемьева «Вертолеты против подводных лодок»  Михаил НИКОЛЬСКИЙ |
|
||
|
Главная | В избранное | Наш E-MAIL | Прислать материал | Нашёл ошибку | Верх |
||||
|
|
||||