|
||||
|
|
И все-таки оно вертится GPS, Глонасс, Galileo… Кто в наше время не слышал этих заклинаний, особенно во время прошлогоднего чудесного возрождения отечественной навигации, живо напомнившего о временах "кукурузы - царицы полей"? Избалованному возможностями современных навигационных сервисов потребителю кажется, что они появились еще бог весть когда - наверное, сразу после полета Юрия Гагарина. Меж тем и GPS, и Глонасс - относительно молодые системы, развернутые практически одновременно - в начале 1990-х годов. Только разработка Соединенных Штатов быстро получила толчок к коммерческому развитию, а наша наполовину развалилась при распаде сверхдержавы. Кстати, изначально предполагалось, что название Global Positioning System (GPS) будет относиться к любым спутниковым системам позиционирования. А американскую службу официально именовали NAVSTAR (Navigation System Using Time and Ranging). Но поскольку она оказалась единственной полностью развернутой глобальной спутниковой системой, NAVSTAR стала называться GPS NAVSTAR, а чаще просто GPS. Хотя американской навигационной системой пользуются во всем мире, ее главный ко зырь - высокоточное наведение оружия - остается в руках Пентагона. Вдоба вок Министерство обороны США мо жет от ключить сигнал со спутников для всех граж данских пользователей во всем мире (вклю чая пассажирские самолеты и корабли) или выборочно для какого-то географического региона[Достаточно крупного региона. Например, можно отключить сигнал для китайских потребителей, сохранив работу гражданских GPS-приемников на территории США. А вот Мексику полностью "отрубить" уже не получится; правда, там сигнал можно глушить локально с помощью наземных средств/авиации.]. Разумеется, подобная си туация другие страны не устраивает. Те, у кого есть выход в космос (Россия, Европа, Индия, Китай, Япония), разрабатывают или совершенствуют собственные системы спутникового позиционирования. В меж дународных документах все эти службы, включая GPS, обозначаются как GNSS (Global Navigation Satellites System - глобальные навигационные спутниковые системы, ГНСС). Теперь, когда мы разобрались в терминологии, перейдем к общему устройству глобальных спутниковых служб на примере американской NAVSTAR и российской Глонасс. Эти навигационные системы имеют много общего (что неудивительно - ведь создавались они в одно и то же время). Общие черты можно проследить в назначении, номинальном составе и принципе работы. Есть, конечно, и масса отличий, которые дают дополнительные преимущества при использовании разных навигационных систем гражданскими пользователями. НазначениеГНСС предназначены для определения не только местоположения, но и скорости движения, а также точного времени морских, воздушных, сухопутных и прочих потребителей. NAVSTAR и Глонасс - системы двойного назначения, разрабатывались по заказу и под контролем военных. Поэтому первое и главное назначение у них стратегическое. Все действующие ныне спутники передают два вида сигналов: стандартной точности для гражданских пользователей и высокой точности для военных (этот сигнал закодирован, доступ к нему может предоставить только министерство обороны). Навигационные системы являются независимыми (полностью автономными) и беззапросными (пользовательская аппаратура только принимает сигнал, не посылая запрос на спутник), используют сигналы на основе псевдошумовых последовательностей, применение которых дает высокую помехозащищенность и надежность при невысокой мощности излучения передатчиков. СоставНавигационные системы GPS NAVSTAR и Глонасс состоят из трех основных компонентов: подсистемы космических аппаратов, подсистемы контроля и управления, а также навигационной аппаратуры потребителей. Спутники, разбитые на группы, вращаются в своих орбитальных плоскостях на неизменной средневысотной орбите, на постоянном расстоянии от поверхности Земли (около 20 тысяч километров). Для получения сигнала в любое время, в любой точке земного шара и в сотне километров от поверхности[Это ограничение для гражданских потребителей. Военные могут пользоваться GPS и на больших высотах. В США, кстати, действуют ограничения на продажу навигационной аппаратуры, работающей на больших скоростях и высотах.] при используемой геометрии требуется 24 спутника (это справедливо и для GPS, и для Глонасс[Орбитальная группировка Глонасс сейчас неполна и насчитывает лишь шестнадцать спутников, из которых используются тринадцать.]). Орбиты 24 аппаратов образуют "сетку" над поверхностью Земли, благодаря чему над горизонтом всегда гарантированно находятся минимум четыре спутника, а созвездие построено так, что, как правило, одновременно доступно не менее шести. У полностью развернутой спутниковой системы имеются также резервные устройства, по одному в каждой плоскости (у GPS плоскостей шесть, у Глонасс - три). В случае выхода из строя основного спутника вместо него могут быть оперативно задействованы резервные. Резервные спутники не бездействуют и тоже участвуют в работе системы, улучшая точность позиционирования и обеспечивая достаточную избыточность. Они могут быть использованы и для улучшения покрытия какого-то отдельного региона. Спутники в ограниченных пределах могут быть перегруппированы по команде с Земли, но в связи с небольшим запасом топлива на борту делается это только в исключительных случаях. Обычно в течение срока службы происходит лишь небольшая коррекция движения. На борту спутника размещено несколько (три-четыре) эталонов времени и час тоты ("атомные часы"), но работает всегда только один эталон. Подсистема контроля и управления состоит из центра и сети вспомогательных станций (чем шире они разбросаны, тем лучше). В задачи подсистемы входит котроль правильности функционирования спутников, уточнение параметров орбит и выдача на спутники временных программ, команд управления и навигационной информации. При движении спутника в зоне видимости станции та осуществляет наблюдение за аппаратом, принимает навигационные сигналы, производит первичную обработку данных и отправляет их в центр управления. Там происходит дальнейшая обработка информации и вычисляются координатные/корректирующие данные, подлежащие загрузке в бортовой компьютер спутника. При этом используется наземный эталон времени и частоты (более точный) для синхронизации бортовых "атомных часов" спутников. Орбитальная группировка NAVSTAR управляется с главной контрольной станции, расположенной на авиабазе ВВС США Шривер (штат Колорадо), и с помощью десяти станций слежения. Главная контрольная станция Глонасс (Космические войска России) расположена в Краснознаменске, а семь станций слежения разбросаны от Санкт-Петербурга до Камчатки. Алгоритм вычисления координат приемником гнсс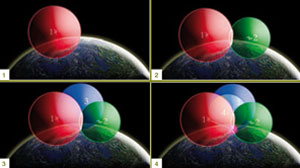 1. Вычислив расстояние от спутника 1 до приемника, представим сферу, где центром будет спутник 1. 2. Вычислив расстояние от приемника до спутника 2, представим себе вторую сферу. Области пересечения двух сфер описывают место нашего предполагаемого нахождения. 3. Для получения более точных данных нам понадобится информация о расстоянии до спутника 3. Одна из двух точек в месте пересечения трех предполагаемых сфер и будет искомым местом (одна из них располагается высоко над поверхностью Земли и в большинстве случаев может быть исключена). 4. Для устранения неверного решения и одновременного уточнения места позиционирования потребуется четвертый спутник. Принцип работы Задача определения пользователем своего местоположения является довольно сложной, так как для вычисления собственных координат на местности прежде необходимо вычислить координаты нескольких спутников. Ведь спутники постоянно движутся, соответственно и координаты их меняются. Для оперативного просчета и уменьшения вычислительной мощности (читай, размеров и стоимости) пользовательской аппаратуры вычисление максимально возможного объема данных было возложено на наземный комплекс управления. В нем по результатам наблюдений за спутниками делается прогноз параметров орбиты в фиксированные (опорные) моменты времени. Во время сеансов связи эти данные передаются на спутник. Зная предполагаемые параметры орбиты и точные координаты спутника в опорной точке, можно вычислить координаты спутника в любой произвольный момент времени. Спрогнозированные параметры орбиты и их производные называются эфемеридами. Набор сведений, описывающий текущее состояние навигационной системы в целом (включая "загрубленные" эфемериды) и применяемый для поиска видимых спутников/выбора оптимального созвездия, именуется альманахом. Спутниковые передатчики постоянно транслируют навигационные сообщения, содержащие эфемериды с метками времени и альманахом. Передача осуществляется на тех же частотах, что и дальномерный код (с невеликой скоростью 50 бит/с). Пользовательская аппаратура, принимая такое навигационное сообщение и опираясь на заложенный в памяти предыдущий альманах, максимально быстро и точно определяет координаты спутника. Зная точное расстояние от спутника до Земли и эталонное время распространения радиосигнала, приемная аппаратура может вычислить расстояние от спутника до пользовательского приемника. Выяснив расстояние до нескольких спутников, можно определить свое местоположение (см. врезку на предыдущей странице). Конечно, на практике все гораздо сложнее: нужно учитывать влияние ионосферы и тропосферы, где сигнал замедляется; естественные и искусственные препятствия для прохождения радиоволн; отражение сигнала от различных поверхностей и т. д. Располагая даже новейшим приемником для гражданского применения, максимальная точность, на которую можно рассчитывать, используя группировку NAVSTAR, составляет 2–5 метров. Для сравнения, геодезическое оборудование обеспечивает точность до одного метра, а военное - до нескольких сантиметров (!). Дело в том, что для разных потребителей передается разный сигнал и применяется совершенно разная аппаратура (например, в геодезических приемниках ради точности приносятся в жертву цена, габариты, масса и энергопотребление). Значительно повысить аккуратность определения координат позволяют дифференциальные поправки, делающиеся на основе данных наземных станций и/или дополнительных спутников. Наиболее развитой вспомогательной широкозонной местной системой позиционирования (их принято именовать аббревиатурой SBAS) считается американская WAAS, созданная по инициативе Управления гражданской авиацией США. Она включает четыре десятка наземных станций, разбросанных по всей территории Северной Америки, и два спутника. Своими широкозонными, накрывающими целый регион, системами располагают также Евросоюз (EGNOS может работать и с NAVSTAR, и с Galileo), Япония (MSAS), Индия и Китай; кроме того, несколько подобных служб (StarFire и OmniSTAR) находятся в частном ведении. В России такой системы, к сожалению, пока нет. Движение неподвижногоНа прошедшем в марте Втором международном семинаре по спутниковой навигации и мониторингу в России прозвучал любопытный доклад Вадима Костерина о дифференциальной коррекции навигационных данных в системах спутникового мониторинга при определении транспортных издержек. Вадим Костерин - сотрудник кафедры информационных систем Южно-Уральского государственного университета. Суть поднятой им проблемы состоит в минимизации флуктуаций показаний неподвижного навигационного приемника. Человеку, не знакомому с тонкостями работы навигационного приемника, ситуация может показаться не вполне очевидной, а потому ее лучше проиллюстрировать. Подобные графики весьма характерны для бюджетных приемников ГНСС. Эти устройства имеют, как правило, скромные вычислительные возможности, поэтому они отдают географические координаты в интегрированную систему в "сыром" виде, не внося в них каких-либо коррекций. Коррекции же необходимы, так как по своей природе ГНСС не может работать без погрешностей - слишком уж много не управляемых потребителем навигационной информации факторов, влияющих на точность: изменяющееся влияние атмосферы на прохождение сигнала, прием не прямого, а отраженного от наземных объектов сигнала, отклонение орбит спутников от расчетных, ошибки часов приемника и др. Программное обеспечение, которое их не учитывает, для каждого отсчета получает ошибку в определении координат до 50 метров. 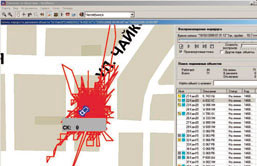 Так, например, за время погрузки/разгрузки автомобиля с подобным приемником машина может за 20–30 минут "уехать" на 5–10 км со средней скоростью 10–15 км/час, что, разумеется, недопустимо при решении задач транспортного мониторинга. Для КАМАЗа десяток таких остановок за восемь рабочих часов - это полторы тысячи "бензиновых" рублей, улетевших в никуда. Как образно заметил один из коллег: "Мне не до шуток, когда заказчик видит на экране, что за время разгрузки здание его склада на карте покрывается равномерной паутинкой траекторий неподвижного автомобиля". Наиболее универсальным решением проблемы было бы использование дифференциальных поправок с помощью вспомогательной наземной системы позиционирования. Однако в нашей стране реальные результаты в этой области есть пока только у "Навгеокома" и только по центральным регионам и югу. Для оставшихся 80% территории приходится использовать суррогатные методы. Для мониторинга транспорта, скажем, мы разработали следующую схему. Раз погрешности предоставления географических координат с использованием ГНСС наиболее заметны в момент покоя автомобиля, нужно лишь научиться отличать остановившийся автомобиль от движущегося. Если судить по картинке, то скорость, которая вычисляется как частное от расстояния между соседними отсчетами и временем дискретизации, у нас всегда не нулевая. Это свидетельствует о том, что автомобиль движется всегда, пусть и медленно. Однако скорость кроме значения обладает еще и направлением, что позволяет создать индикатор покоя для приемника ГНСС. Если объект и впрямь движется, то направление изменяется монотонно, скорость изменения направления мала. Если объект неподвижен, то направление скорости, по данным приемника, изменяется хаотически и на большие величины. Конечно, мы сможем определить время остановки с точностью не выше пяти тактов квантования (возможно, трех), но это все равно гораздо лучше, чем просто не обращать внимания на движение неподвижного приемника. Такая задача по зубам даже начинающему программисту. |
|
||
|
Главная | В избранное | Наш E-MAIL | Прислать материал | Нашёл ошибку | Верх |
||||
|
|
||||